


 This information has been archived for reference or research purposes.
This information has been archived for reference or research purposes.
Archived Content
Information identified as archived on the Web is for reference, research or recordkeeping purposes. It has not been altered or updated after the date of archiving. Web pages that are archived on the Web are not subject to the Government of Canada Web Standards. As per the Communications Policy of the Government of Canada, you can request alternate formats on the "Contact Us" page.
Technology

DND photo HSO35005d03 by Master Corporal Paz Quillé
HMCS Montréal in the Gulf of Oman, January 2003.
ocean intelligence in the maritime battlespace: the role of spaceborne sensors and hf radar
![]()
For more information on accessing this file, please visit our help page.
For as long as war has been waged at sea, oceanographic conditions have influenced the performance of naval sensors, weapons, vessels, and personnel. In today’s Navy, this is relevant to submarine operations, anti-submarine warfare, mine countermeasures, amphibious operations, surface and sub-sea navigation, and ship detection. While meteorological sensors and mathematical models have made accurate weather forecasting commonplace, only a few navies are able to forecast the behaviour of the ocean itself, in addition to the atmosphere above it. This oceanographic capability, which has emerged within the last 10 years, represents a substantive military advantage and is the subject of ocean intelligence.
Among NATO countries, the United States and France are the most advanced in this field as a result of developments in the 1990s: the launching of a broad range of oceanographic satellites, advancements in high-performance computing and environmental modelling, and the internet. The United States has also extended its lead in ocean intelligence through the installation of an extensive network of civilian coastal HF radar stations.1
This article addresses two of these developments – spaceborne sensors and coastal HF radar installations. It includes an overview of operational ocean intelligence platforms and identifies optimal spaceborne and coastal HF radar sensors for shallow waters.
operational platforms
Our understanding of oceanographic influences upon naval operations is often limited by the techniques available to observe them. There are five primary platforms for naval environmental sensors – satellites, aircraft, in situ platforms, vessels, and shore-based installations. As all environmental platforms have limitations, the five types usually complement each other rather than compete. The Canadian Forces, for example, make extensive use of airborne, in situ, and vessel-mounted sensors when engaged in anti-submarine warfare activities.
Of significance are the scales in time and space at which these technologies operate, relative to the ocean feature of interest (such as temperature, salinity, currents, etc.).
In situ sensors are the most widely used type of marine environmental sensor. They provide accurate point-source data pertaining to water temperature, salinity, optical properties, sea state, currents, and other features. And, as the atmosphere and oceans are linked like Siamese twins, it is also common to find meteorological sensors on surficial in situ platforms, especially wind speed and direction sensors.
All of the environmental features mentioned above can also be measured with sensors mounted on aircraft and satellites. In practice, the question of which platform to employ for a given military operation often comes down to a matter of available resources. The definition of available resources, however, has changed in recent years, to the point that a modern operational meteorological and oceanographic observation and forecasting centre bears little resemblance to its Cold War counterpart.
Within the last decade, a range of oceanographic satellites and coastal HF radar sites have become operational, and practical ocean intelligence applications have been developed for these sensors.2,3 As a result, the utilization of satellite sensors and coastal HF radar installations is becoming less an option and more an essential element of a comprehensive coastal ocean intelligence programme. The key attribute of these platforms is their synoptic view of the maritime battle space. Satellites and coastal platforms allow us to view shallow waters on spatial scales not sampled by in situ or vessel-mounted sensors. Airborne sensors are also capable of providing a synoptic view of coastal waters.4 They are, however, beyond the scope of this discussion.
ocean features of military significance
Earth-observation satellites and coastal HF radar installations are used for two general purposes – detecting naturally occurring environmental features and detecting anthropogenic features. The latter includes activities such as ship detection and oil spill monitoring. The first group of applications, involving naturally occurring features, are the ones which collectively define the subject of ocean intelligence and have been the most successful from an operational perspective.
Table 1 identifies naval ocean intelligence requirements in shallow waters that may be addressed with spaceborne sensors or coastal HF radar technologies. We focus on shallow waters as they are a NATO priority.5 In this context, we define such waters as those extending from the shore to the continental shelf.
| Operational Naval Environmental Assessment Requirement | Detectable with Satellites( |
Relevant Naval Operation |
|---|---|---|
| 3-D Sound Velocity | ASW, SubOps | |
| Bottom Acoustic Properties | ASW, SubOps | |
| Ambient Noise | ASW, SubOps | |
| Location of Marine Mammals | ASW, SubOps | |
| Bathymetry | ASW, SubOps Navigation |
|
| 3-D Water Density | ASW, SubOps | |
| Surface Temperature | ASW, SubOps Search & Rescue |
|
| Subsurface Temperature | ASW, SubOps | |
| Surface Currents | Search & Rescue Navigation, SubOps Ship Detection, MCM AmphibOps, ASW |
|
| Subsurface Currents | ASW, SubOps, MCM | |
| Surface Winds (speed & direction) |
Search & Rescue ASW, Navigation Ship Detection |
|
| Sea State | |
Search & Rescue ASW, Ship Detection AmphibOps |
| Sea Ice | Search & Rescue Navigation |
|
| Internal Waves | ASW Ship Detection |
|
| Turbidity (concentration & quality) |
SubOps, ASW MCM, AmphibOps |
|
| Beach Conditions | AmphibOps |
Table 1. Naval requirements for operational oceanographic information (i.e. ocean intelligence) in shallow waters. In this context, shallow = shore to continental shelf. ASW = anti-submarine warfare; SubOps = submarine operations; MCM = mine countermeasures; AmphibOps = amphibious operations. Navigation refers to the navigation of surface vessels.
Requirements identified in Table 1, for which there is no applicable satellite or HF radar technology, generally involve subsurface features, which cannot be monitored with sensors mounted on these types of platforms. As Table 1 refers to shallow waters, satellite sensors that have application in oceanic waters but not in shallow waters are not shown. Thus, for example, although spaceborne altimeters provide bathymetric information in oceanic environments, existing systems are not able to do so with sufficient resolution in shallow waters since spatial scales less than 20 km cannot be interpreted with confidence close to shore.6
hf radar in coastal waters
HF radar sensors operate within the frequency band of 3 to 30 MHz, and coastal installations are capable of providing coverage over most of the continental shelf. Their operating range, however, varies with frequency, system design and local environmental influences, with commercially available systems having ranges between a few tens of kilometres to 400 km offshore. These systems monitor the targeted environment continuously, with resulting data delivered directly to the operator within minutes of sampling. In combination, these capabilities result in coastal HF radar being well suited to support certain shallow water military operations.
HF radar systems reported in the civilian literature have been optimized to detect different marine features. Optimal applications, advantages and disadvantages of each system are as much a matter of engineering design and proprietary signal processing techniques as they are of operating frequency. The Canadian Forces, for example, are installing an HF radar system manufactured by Raytheon which has been optimized for ship detection. However, ship detection per se is beyond the scope of this discussion of ocean intelligence.
In the context of ocean intelligence, and as indicated in Table 1, coastal HF radar technologies are relevant to naval operations requiring synoptic surface current vectors or surface wave information in shallow waters. Various European HF radar systems, for example, are being optimized to provide synoptic close-in surface wave information.1
Without doubt, the most prolific HF radar system is the commercially available CODAR SeaSonde system (See Figure 1), which has been optimized to provide synoptic surface current information. CODAR SeaSonde systems account for more than 80 percent of the coastal HF radars used world-wide for ocean intelligence operations and civilian maritime environmental assessment. To date, CODAR systems have been installed in 11 countries, with the USA having blanketed large areas of its coastline with this technology (See Figure 2).
The Canadian Forces are experimenting with extraction of surface current information from its Raytheon ship detection HF radar system. Although the long-range versions of the Raytheon and CODAR systems operate at similar frequencies, they have fundamental differences in design and signal processing software, which in turn have operational implications. The Raytheon system, for example, may at times operate at a range which is double that of the standard CODAR SeaSonde system.
Although theoretically feasible, from a cost perspective it is unlikely that any navy would use the Raytheon system operationally to obtain synoptic surface current vectors. The reason for this is that only one HF radar site is required for ship detection, whereas two sites are required to generate synoptic surface current vectors, and the distance between the two sites must be no more than 40 to 60 percent of the system’s range. This equates to a distance between sites for surface current monitoring which is substantially less than that required for two adjacent sites optimized for ship detection. With the CODAR surface current system costing approximately one-twentieth the price of the Raytheon ship detection system, the international user community has gravitated toward the substantially less expensive CODAR system to satisfy needed ocean intelligence requirements.
Another factor in favour of the CODAR system is that the Raytheon system cannot see littoral waters. In fact, it does not operate within the first few tens of nautical miles from shore, whereas the CODAR system can be operated within this zone. The littoral zone is a key area for several relevant military operations, such as amphibious operations and mine countermeasures.

Figure 1. A typical CODAR HF radar site installation, with this particular installation being located in Japan. The Japanese Coast Guard operates CODAR SeaSonde HF radar systems at the entrances to Tokyo and Sagami Bays. 1(a) the system’s transmit antenna. 1(b) The system’s receive antenna and accompanying on-site electronics. Photos courtesy of the Japanese Coast Guard and CODAR Ocean Sensors Ltd.
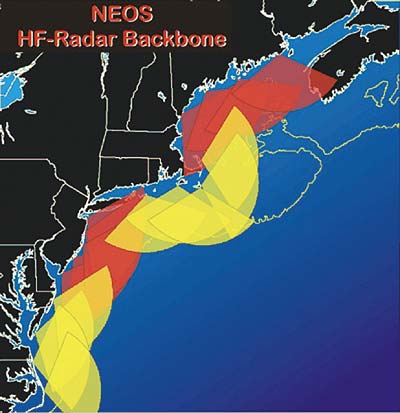
Figure 2. Existing (red) and planned (yellow) CODAR HF radar installations along the north-eastern coastline of the USA. Image courtesy of the North East Observing System Web site (http://marine.rutgers.edu/neos/) and Rutgers University.
civilian earth-observation satellites
At present, there are more than 30 civilian satellite sensors monitoring the world’s oceans. From an applications perspective, they fall into seven groups, with each having similar applications in maritime waters.1 The groupings are: land-optimized multispectral sensors, marine-optimized multispectral sensors, thermal IR sensors, altimeters, passive microwave sensors, synthetic aperture radars, and scatterometers.
The complete suite of existing sensors and groupings can be viewed online at www.oeatech.com.1,2 Here, only the first two groupings are profiled as a means of providing a basic understanding of relevant aspects of these spaceborne sensors, and to provide context for subsequent discussion.
The land and marine-optimized multispectral satellite sensors are listed in Table 2. Table 2(a) lists sensors designed primarily for terrestrial applications, but which are also employed in coastal environments, whereas Table 2(b) lists those whose spectral bands and sensitivities have been optimized for aquatic applications. As defined in the table caption, if an application is reasonably well founded, it is identified with a black bar. In practice, these are the only applications that are likely to be of operational value to military commanders.
A key observation with regard to this aspect of ocean intelligence is that many of the existing civilian sensors were designed for research, development or demonstration purposes. As a result, many of these sensors are not of immediate practical benefit to military operations.
2a
| SATELLITE | ORBVIEW 3 | QUICKBIRD | IKONOS | SPOT | LANDSAT & EO | SAC-C |
|---|---|---|---|---|---|---|
| SENSOR | multi-spectral | multi-spectral | multi-spectral | HRG | ETM & ALI | MMRS |
| revisit time (days)1 | ~3 | ~3 | ~3 | ~3 | 16 | 9 |
| near-real time2 | no | no | no | no | no | no |
| spatial resolution (m) | 4 | 2.5 | 4 | 10 | 30 & 30 | 175/350 |
| country or agency | USA | USA | USA | France | USA | Argentina |
| Floods/Storm Surge | Black | |||||
| Fronts/Eddies (biological) | ||||||
| Fronts/Eddies (thermal) | Grey | |||||
| Ice | Grey | |||||
| Surface Temperature | Grey | |||||
| Turbidity | Grey | |||||
| Vegetation (beach/nearshore) | Black | |||||
| Water Coloring Constituents | Grey | |||||
2b
| SATELLITE | KOMPSAT | OCEANSAT | ORBVIEW 2 | ENVISAT | TERRA & AQUA |
|---|---|---|---|---|---|
| SENSOR | OSMI | OCM | SEAWIFS | MERIS | MODIS |
| revisit time (days)1 | ~2 | ~2-3 | ~1 | ~2-3 | ~1 |
| near-real time2 | no | no | yes | no | yes |
| spatial resolution (m) | 1000 | 360 | 1100/4000 | 300/1200 | 1000 |
| country or agency | Korea | India | USA | ESA | USA |
| Floods/Storm Surge | |||||
| Fronts/Eddies (biological) | Black | ||||
| Fronts/Eddies (thermal) | Black | ||||
| Ice | Grey | ||||
| Surface Temperature | Black | ||||
| Turbidity | Black | ||||
| Vegetation (beach/nearshore) | |||||
| Water Coloring Constituents | Black | ||||
Table 2. (a) land-optimized and (b) marine-optimized multispectral polar-orbiting satellite sensors used to observe coastal features, as of October 2003. A black bar indicates the application is reasonably well founded. A grey bar indicates the sensor is not optimal for this application but merits consideration. See Notes7 for further explanation of Tables and a listing of acronyms. Reprinted with permission.1 [not included in Table 2b: three Chinese research sensors (CMODIS, COCTS, CZI), the data from which are only available within China, and one Taiwanese research sensor (OCI). Table 2 also does not include India’s latest satellite, Resourcesat-1, which was in its commissioning phase at time of writing. Visit www.ioccg.org for technical details on these and other ocean color sensors.]
Table 2 includes information intended to help the operational commander determine whether the sensor has significant operational utility. For example, in addition to listing the sensor’s spatial resolution, which refers to the smallest physical unit discernible by the sensor,8 the table lists the sensor’s revisit time, which refers to how often the sensor revisits a given geographic area. In general, relevant naval operations require ocean intelligence sensors that revisit shallow waters at least daily. This requirement is less stringent for most operations involving the open ocean, or beach areas, where sensors that revisit every few days can be of significant operational benefit.
Another key operational parameter is whether the satellite programme operates in near-real time. Ocean intelligence in shallow waters is a perishable commodity in that it is often only of value to the operational commander for a period of hours. Thereafter, these waters may have changed to such an extent that they need to be re-sampled to determine existing conditions. A near-real time satellite programme routinely delivers Earth-observation data to the user within two hours of satellite overpass.2 Most of the satellite programs designed for research and development purposes, or for terrestrial purposes, are not able to do this.
Multispectral satellite sensors listed in Table 2(a) are well known for their terrestrial mapping applications. These sensors have also proven to be useful in aquatic coastal projects involving tropical and subtropical waters, where the water is relatively clear. And with spatial resolutions ranging from a couple of metres to tens of metres, they meet the spatial resolution requirements of near-shore mapping operations.
On the other hand, sensors listed in Table 2a are not optimal for observing in-water constituents, as indicated by their optimal applications. And, as they were designed for terrestrial mapping purposes, they have revisit times that are too infrequent to monitor most littoral processes. In addition, they are not near-real-time data sources, which means that commanders operating in littoral waters are unlikely to obtain the ocean intelligence derived from these sensors within required time constraints. Another relevant consideration is that most of these sensors are flown on commercial satellites and therefore their data must be purchased. For operational programmes, such data costs can amount to millions of dollars per annum.

Figure 3. Modis (Terra) image off the coast of Argentina taken on 10 February 2003 showing extensive blooms of phytoplankton. Image generated by Jacques Descloitres of NASA’s GSFC and provided courtesy of James Acker. For further information access http://visibleearth.nasa.gov/cgi-bin/viewrecord?25060
NASA’s spaceborne Coastal Zone Color Scanner sensor, which was launched in 1978 and produced data for the period 1979 to 1986, forever changed the way we view the world’s oceans, and subsequently encouraged the development, and eventual launch, of the marine-oriented multispectral sensors listed in Table 2(b). The more recent sensors listed in this table, such as Modis and Meris, have spectral bands that improve their ability to distinguish colouring constituents that may be present in shallow waters, such as those of terrestrial, benthic and pelagic origin.
An example of a Modis image, taken off the coast of Argentina, is provided in Figure 3. Note the abrupt changes in water clarity, which are caused by the presence of in-water constituents – in this case marine phytoplankton. Substantive changes in water clarity in shallow waters are of relevance to anti-submarine warfare, mine countermeasures, submarine, and amphibious operations. Although water-clarity (e.g. turbidity) maps can be generated from data collected by sensors mounted on aircraft, satellites represent the only practical platform from which to generate synoptic maps of the quantity and quality of in-water constituents on a routine basis in hostile territories.
Even among these marine-oriented multispectral sensors, certain programmes have been designed for research, development, and demonstration purposes, whereas others have clear operational advantages. Meris, for example, has a higher spatial resolution than Modis (300 m versus 1 km), and early research results indicate that the quality of Meris data is very good. However, Meris’ effective revisit time is not optimal for operational military applications, and the quality of multispectral data required for research purposes may be much greater than what is required for operations utilizing relatively simple turbidity maps. In addition, Modis allows for direct reception using inexpensive X-band receiver dishes, and, therefore, the user can obtain resulting information within minutes of satellite overpass. Modis also senses both optical and thermal properties concurrently, thereby greatly increasing its utility for applications such as anti-submarine warfare, search and rescue, and submarine operations.
operational ocean intelligence sensors
In Table 3, all seven categories of satellite sensors are cross-referenced with Table 1. This results in a presentation of civilian spaceborne sensors and HF radar that can be used for operational ocean intelligence purposes.
Note that this synthesis, in which we have cross referenced requirements with technologies, results in a table that does not include several identified ocean intelligence requirements (Table 1), and only includes 16 of the more than 30 satellite sensors. As discussed previously, this reflects the facts that several requirements involve subsurface features, which cannot be detected by sensors mounted on satellites and shore-based platforms, and that many of the existing spaceborne programmes were not designed for operational military purposes.
| Operational Requirement | Optimal Sensor Type | Applicable Satellite Sensors or HF Radar• | Country or Agency | Naval Operation |
|---|---|---|---|---|
| Surface Temperature (Yellow) | thermal IR (Yellow) | AVHRR, Modis (Yellow) | USA (Yellow) | ASW, SubOps Search & Rescue (Yellow) |
| Surface Currents (littoral) (Yellow) | HF radar (Yellow) | CODAR SeaSondes• (Yellow) | not applicable (Yellow) | Search & Rescue, SubOps, Navigation Ship Detection AmphibOps, ASW (Yellow) |
| Surface Winds (speed & direction) (Yellow) | scatterometer (Yellow) | Quickscat ERS Scat (Yellow) | USA, ESA (Yellow) | Search & Rescue Ship Detection, Navigation (Yellow) |
| Turbidity (Yellow) | multispectral (marine-oriented)(Yellow) | Seawifs, Modis, Meris (Yellow) | USA, ESA (Yellow) | ASW, AmphibOps SubOps, MCM (Yellow) |
| Sea Ice (Yellow) | SAR (Yellow) | Radarsat, Envisat (Yellow) | Canada, ESA (Yellow) | Search & Rescue Navigation (Yellow) |
| Sea State (surface waves) (Yellow) | HF radar altimeter SAR (Yellow) | all HF radars•, GFO Topex/Poseidon, Jason Radarsat, Envisat (Yellow) | USA, France Canada, ESA (Yellow) | Search & Rescue Ship Detection, AmphibOps (Yellow) |
| Geostrophic Currents, Ocean Bathymetry, Fronts & Eddies (Grey) | altimeter (Grey) | Topex/Poseidon GFO, Jason (Grey) | USA, France (Grey) | Search & Rescue NavigationShip Detection (Grey) |
| Beach Mapping (Grey) | multispectral (land-oriented) (Grey) | Quickbird, Ikonos Orbview 3, Spot (Grey) | USA, France (Grey) | AmphibOps (Grey) |
Table 3. Civilian satellite sensors & coastal HF radars that address operational requirements for ocean intelligence. Sensors and requirements listed with a yellow background refer to shallow waters (shore to continental shelf). Requirements shown with a grey background either pertain to oceanic waters or to aspects of the beach and foreshore (i.e. beach mapping). See Notes for definition of acronyms.
Sensors highlighted in yellow in Table 3 will be of benefit to maritime commanders conducting operations in shallow waters. There are spaceborne sensors that can detect an oceanographic parameter highlighted in yellow but are not included in this table because they do not meet certain practical operational requirements, as discussed previously in association with Table 2. The ATSR sensor flown on the Envisat satellite, for example, does an excellent job of detecting sea-surface temperature, and with greater accuracy than the listed AVHRR sensor, but its data are not obtainable in near-real time in most geographic locations. This essentially precludes its use for operational ocean intelligence purposes in shallow waters. The ATSR sensor was designed primarily for climatological research purposes.
With the exception of coastal HF radar technologies, all of the sensors highlighted in yellow can also be used operationally in oceanic waters. In fact, for oceanic waters, where operational time and space requirements are often less stringent than for shallow waters, certain sensors excluded from Table 3, such as the ATSR sensor flown on Envisat, may be of practical benefit.
Sensors highlighted in grey in Table 3 refer to requirements that involve oceanic waters or the foreshore (i.e. two zones which bound shallow waters). These include determination of geostrophic currents in oceanic waters with spaceborne altimeters, and mapping foreshore terrestrial features with land-optimized multispectral sensors. Neither of these applications requires data to be delivered in near-real time, and the sensors’ revisit time does not need to be daily or better.
Table 3 does not include altimeters in sun-synchronous orbit, and it is noted that altimeters are only used to determine the time variant component of geostrophic currents, not the absolute current itself. This reflects our limited ability to measure the marine geoid, which is used as a reference surface for such calculations.10 However, this situation is changing. In March 2002, the German/US Grace satellite was launched with the objective of measuring the geoid with greater accuracy than previously possible. The European Space Agency is planning to launch a similar type of mission in 2007. Thus, the operational utility of spaceborne altimeters is likely to increase substantially over the coming years. There is a caveat, however, that such sensors will continue to be limited to mesoscale and basin-scale processes as long as there is an insufficient number of altimeter sensors in orbit to meet the time and space requirements of finer scale processes. Mesoscale variability is defined as being on the order of 50 to 100 km and 10 to 100 days at mid-latitudes.10
The operational requirement for information pertaining to surface waves, listed in Table 3 as “Sea State”, represents a unique grouping inasmuch as information pertaining to surface waves can be obtained with both HF radar and spaceborne sensors. Furthermore, two of the seven categories of spaceborne sensors are relevant to this requirement. Yet, we are unaware of any military that relies primarily on these sensors to obtain operational sea state information in shallow waters. The surface wave field is usually determined operationally with sensors mounted on in situ platforms, or it is forecast with models that are constrained by in situ data.
Where applicable, Table 3 indicates which country or agency is controlling the satellite since this provides insight into a particular organization’s ability to gain access to the satellite’s data. For example, Table 3 indicates that the USA and France have exclusive ownership of the civilian land-optimized multispectral spaceborne sensors and of all spaceborne altimeters that are not in sun synchronous orbit. This analysis does not include multispectral sensors flown on Indian Earth-observation satellites and other such civilian satellites having restrictive data distribution policies (e.g. relevant Chinese satellites).
closing comments
Although Earth-observation satellite and HF radar technologies have matured within the last decade, they continue to evolve and have inherent limitations. Foremost, they only detect surficial features, whereas much of the required naval environmental information pertains to subsurface features. The sensor’s depth of penetration into the water column varies from a few microns to a few tens of metres, depending on the particular sensor, platform and body of water.
Second, satellite and shore-based sensors are separated from coastal waters by the atmosphere, and certain types of sensors mounted on these platforms are influenced by or otherwise rendered unusable by atmospheric effects. For example, the atmosphere contributes over 90 percent of the signal recorded by spaceborne marine optical sensors.9 Cloud cover, which represents but one aspect of this issue, is arguably the greatest practical limitation of optical satellite sensors in maritime waters. Typically, it covers 60 percent of the tropical ocean and 75 percent of the ocean at mid-latitudes.10
Although environmental modelling is beyond the scope of this article, it would be misleading to leave the impression that the only ocean intelligence value of sensors identified here is the direct benefit obtained from their real-time data. A substantive indirect benefit of data produced by such sensors is their ability to constrain and improve the results of operational ocean forecasting models.
Ocean models of shallow waters are of great significance to the field of ocean intelligence, and therefore to naval operations in such waters. An example of the utility of coastal models, and the role played by spaceborne and HF radar sensors in such models, is depicted in Figure 4. Note the substantially improved resolution of coastal eddies and fronts when the model is constrained by CODAR SeaSonde HF radar data and surface wind data. Similar improvements are being obtained through the inclusion of various types of spaceborne data, such as altimeter data. This example involves ocean features of relevance to anti-submarine warfare, submarine operations, amphibious operations, mine countermeasures, search and rescue, ship detection, and navigation.
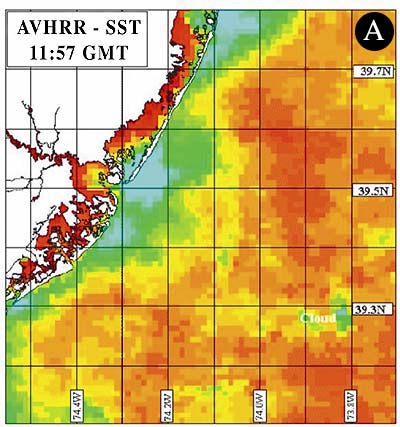


Figure 4. An example of the information content of stand-alone spaceborne and HF radar data for coastal waters versus the benefit of fusing these environmental data into coastal environmental nowcasting and forecasting models. 4(a) Sea-surface temperature map derived from NOAA’s AVHRR spaceborne sensor. 4(b) Numerical model output of surface currents and temperature with model constrained by surface wind data only.11 Model output produced by Rutgers University. 4(c) Numerical model output of surface currents and temperature with model constrained by surface wind data and surface current data derived from CODAR coastal HF radar sensors (five days difference between assimilation and comparison). Images courtesy of Rutgers University.
![]()
Dr. Brian G. Whitehouse is President of OEA Technologies Inc.
Dr. Daniel Hutt is a defence scientist with Defence R&D Canada – Atlantic.
notes
- B.G. Whitehouse, Ocean Intelligence in the Maritime Battle Space, analysis and recommendations for a Canadian Forces maritime environmental assessment program, DRDC-Atlantic CR 2003-176, 2003.
- B.G. Whitehouse and D. Hutt, Observing “Coastal Waters with Spaceborne Sensors” in Remote Sensing of Aquatic Coastal Ecosystem Processes, L. Richardson and E. LeDrew (eds), Kluwer Academic Publishers, The Netherlands, (in press).
- D. Barrick, “Proliferation of SeaSonde Coastal Current-Mapping Radars”, Hydro Intern., 7(1), 2003.
- Coastal Remote Sensing, NOAA Coastal Services Center, U.S. Department of Commerce, Charleston, USA, accessed at www.csc.noaa.gov, 2003.
- E. Pouliquen, A.D. Kirwan Jr. and R.T. Pearson (eds), Rapid Environmental Assessment, SACLANTCEN Conference Proceedings Series CP-44, NATO SACLANT Undersea Research Centre, La Spezia, Italy, 1997.
- D.T. Sandwell, S.T. Gille and W.H.F. Smith (eds), Bathymetry From Space: Oceanography, Geophysics, and Climate, Geoscience Professional Services, Bethesda, Maryland, 24 pp, accessed at www.igpp.ucsd.edu/bathymetry_workshop/, 2002.
- Table 2 is limited to polar-orbiting satellites that are in orbit and delivering data as of October 2003, and are able to sense Earth at mid-latitudes. It does not include satellites that have been launched but are no longer being used, or have been proposed or are being built for future launch. Where a satellite program involves a series of satellites, the table only lists relevant sensors mounted on the latest satellite in the series. Superscripts: 1. The sensor’s revisit time refers to either the satellite’s orbit recycle time or the sensor’s effective revisit time (identified with a ‘~’) at mid-latitudes. Revisit time varies with latitude and sensor configuration. 2. Near-real time refers to satellite data that is delivered to the user within two hours of satellite overpass.
- H.J. Kramer, Observation of the Earth and its Environment – Survey of Missions and Sensors, 4th Edition, Springer Verlag, 2002.
- D. Antoine, A. Morel, B. Gentili, et al, “In Search of Long-term Trends in Ocean Color”, EOS, Vol. 84(32), pp. 301-309, 2003.
- D.B. Chelton, J.C. Ries, B.J. Haines, L-L Fu and P.S. Callahan, “Satellite Altimetry” in Satellite Altimetry and Earth Sciences, L-L Fu and A. Cazenave (eds), Academic Press, pp 1-131, 2001.
- J. Kohut, S. Glenn, and D. Barrick, “SeaSonde is Integral to Coastal Flow Model Development”, Hydro Intern., 3(3), 1999.
list of acronyms (excluding compound acronyms)
| ALI | Advanced Land Imager |
|---|---|
| ASW | Anti-Submarine Warfare |
| ATSR | Along Track Scanning Radiometer |
| AVHRR | Advanced Very High Resolution Radiometer |
| ERS Scat | European Remote Sensing Scatterometer |
| ESA | European Space Agency |
| ETM | Enhanced Thematic Mapper |
| GFO | Geosat Follow On |
| HRG | High Resolution Geometric |
| MCM | Mine Countermeasures |
| MMRS | Multispectral Medium Resolution Scanner |
| OCM | Ocean Color Monitor |
| OSMI | Ocean Scanning Multispectral Imager |
| SAR | Synthetic Aperture Radar |


